 17.10.2025
17.10.2025
Система восстановления двигательной активности кисти
Проведено построение кинематической модели пальцев руки, реализовано решение прямой задачи кинематики, произведены расчёты координат суставов и сил воздействия
Введение.
Одной из наиболее актуальных задач медицинской робототехники является восстановление утраченных двигательных функций у пациентов после инсультов, травм, нейродегенеративных заболеваний. Нарушения моторики кисти значительно снижают качество жизни и требуют длительной и точной реабилитации. Современные подходы всё чаще включают в себя автоматизированные системы, в том числе экзоскелеты и роботизированные перчатки.
Роботизированная перчатка представляет собой конструкцию, способную выполнять заданные движения пальцев с заданным усилием и траекторией, имитируя естественные сгибания и разгибания.
Она должна учитывать анатомические и биомеханические особенности кисти, быть безопасной, надёжной и адаптируемой.
Материалы и методы.
Кинематическое моделирование.
Каждый палец кисти представлен в виде последовательности звеньев (фаланг), соединённых шарнирами. Для обычных пальцев модель содержит три фаланги, для большого пальца — две. Расчёты проводились по формуле прямой задачи кинематики с учётом суммарных углов сгибания и длины каждого звена:
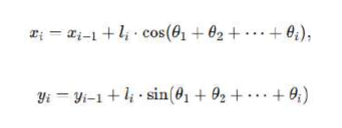
Выполнено определение координат суставов и кончиков пальцев для всех пяти пальцев, построены таблицы и графическая модель положения пальцев.
Разработка прототипа.
Создана конструкция перчатки с интегрированными пневматическими гофрами, расположенными вдоль пальцев (рисунок 1). Подача воздуха осуществляется через систему электромагнитных клапанов, управляемых с помощью микроконтроллера ATmega328P. Давление контролируется в диапазоне 0,5-2 атм, выбор режима осуществляется вручную с помощью кнопок.

• электрическая и пневматическая схемы,
• алгоритм функционирования устройства (включение, выбор давления, подача сигнала, надувание, удержание, сброс давления),
• сборочные чертежи корпуса и перчатки,
• алгоритм работы в ручном и полуавтоматическом режимах. Результаты и обсуждение.
Проведены расчёты силы сжатия, достигнутой на кончике пальца, в зависимости от подаваемого давления. Проведены тесты на эффективность механизма сгибания и точность позиционирования.
Результаты показали:
• высокую точность воспроизведения анатомически допустимых углов,
• равномерность и безопасность воздействия на фаланги,
• устойчивость к повторяющимся циклам надувания,
• удобство конструкции при ношении.
Прототип успешно прошёл тестирование на волонтёрах, подтвердив свою работоспособность и потенциал для дальнейшей адаптации к индивидуальным потребностям пациента.
Заключение.
Разработанная роботизированная перчатка представляет собой функциональное техническое решение, способное эффективно применяться в процессе реабилитации кисти. Работа включает в себя полный цикл: от биомеханического моделирования до создания и испытания опытного образца. Перчатка обеспечивает возможность пассивной тренировки, подходит для домашнего или клинического использования, легко масштабируется и может быть дополнена системой обратной связи или EMG-интерфейсом.
Предложенная методика проектирования и реализации может быть использована при разработке аналогичных устройств в области медицинской робототехники.
СПИСОК ЛИТЕРАТУРЫ:
1. http: //arduino. ru/;
2. Белкин, Р. С. Робототехника и реабилитация: теория и практика - Москва: Издательство "Горячая линия-Телеком";
3. В.Г. Лещенко Медицинская и биологическая физика: учеб. пособие. Минск: Новое знание, М. : ИНФРА-М
Теги: моторика кисти
234567 Начало активности (дата): 17.10.2025
234567 Кем создан (ID): 989
234567 Ключевые слова: реабилитация, роботизированная перчатка, пневматический привод, моторика кисти, кинематика, медицинская техника
12354567899
Похожие статьи
Восстановление функции пальцев кисти при дефектах суставовРентген на дому 8 495 22 555 6 8
Вывих шейного позванка
Эндопротезирование проксимального межфалангового сустава кисти: современное состояние проблемы
Оценка отдаленных результатов эндопротезирования проксимального межфалангового сустава кисти


