 05.03.2025
05.03.2025
Кинематическое выравнивание при роботизированном тотальном эндопротезировании коленного сустава
Выделяют две основных концепции тотального эндопротезирования коленного сустава: механическое и анатомическое выравнивание оси нижней конечности.
ВВЕДЕНИЕ
Анатомическое строение и биомеханика движения здорового коленного сустава постоянно изучаются и являются индивидуально вариабельными, а патологические изменения увеличивают трудности ориентирования в операционной ране, что сказывается на результатах эндопротезирования [1-6].
В начале внедрения в 1970-х годах современных систем тотального эндопротезирования коленного сустава (ТЭКС) точность инструментов была низкой, а ошибки при имплантации — частыми, поэтому основные усилия были направлены на повышении точности установки имплантата, а воспроизведение нормальной биомеханики коленного сустава отходило на второй план [7].
Исторически сложились и долгое время практиковались две основных концепции тотального эндопротезирования коленного сустава: механическая и анатомическая техника выравнивания оси нижней конечности. Основа концепции механического выравнивания оси нижней конечности была заложена J.N. Inshall et al. и подразумевала восстановление механической нейтральной фронтальной оси конечности и расположение линии коленного сустава параллельно горизонту, что улучшало распределение нагрузки на большеберцовый компонент и уменьшало его износ. На основании этой концепции созданы инструменты и разработана техника операции [8-10].
Конкурирующая методика D.S. Hungerford et al. основывалась на концепции анатомического выравнивания оси конечности, при этом механическая ось конечности также восстанавливалась до нейтральной, но линия сустава располагалась в пределах 3° варусного отклонения к механической оси конечности, что улучшало биомеханику колена [9, 11, 12].
Философия механического выравнивания основана на точности резекции кости и устранении дисбаланса связок путем релиза связочного аппарата, что позволяло увеличить продолжительность срока службы имплантатов. При анатомическом выравнивании баланс связок не требует расширенного релиза, однако трудность выполнения резекции костей с варусным углом 3° приводила к более выраженным деформациям, что влияло на износ компонентов эндопротеза и мешало широкому распространению техники анатомического выравнивания [12].
Систематический обзор исследований по анализу походки пациентов после ТЭКС J.A. McClelland et al. продемонстрировал значительные кинематические отличия в сравнении с нормальной походкой [13]. Исследование J. Bellemans et al. показало, что 32 % мужчин и 17 % женщин имеют конституциональный варус коленного сустава в 3° [14]. По данным A.M. Almaawi et al., анатомический разброс показателей у 4884 пациентов с остеоартрозом при планировании ТЭКС выявил, что HKA (англ.: Hip-Knee-Ankle) был > 3° у 40 %, > 5° — у 19 % и > 10° — у 3 % пациентов. Поэтому реконструкция нейтральной механической оси у этих пациентов требовала значительной резекции кости, вызывала дисбаланс мягких тканей, проблемы с ориентацией линии сустава, что привело к выраженным изменениям кинематики коленного сустава [3].
Основываясь на данных исследованиях, S.M. Howell et al. предложили концепцию кинематического выравнивания, главной идеей которой является сохранение уровня линии сустава и оси нижней конечности, имевшихся у пациентов до начала остеоартроза [9, 10, 15].
Первоначально кинематическое выравнивание было предложено выполнять по результатам КТ / МРТ-сканирования с использованием индивидуальных направителей [16, 17].
Однако направители долго изготовлялись (10-14 дней), трудно устанавливались, ломались и были достаточно дорогими. Применение стандартного инструментария не дает возможности надежно выполнить резекции костей для кинематического выравнивания, применение компьютерной навигации позволяет визуализировать ось конечности, но точность резекции не гарантирует, а специальный инструмент или индивидуальное эндопротезирование является очень дорогим [15].
Внедрение в клиническую практику роботизированных ортопедических систем позволяет планировать и выполнять резекцию костей с высокой точностью, устанавливать компоненты эндопротеза согласно выбранной концепции и дает новые возможности применения кинематического выравнивания [18-23].
Цель работы - оценить эффективность роботической хирургической системы в выполнении ограниченного кинематического выравнивания при ТЭКС.
МАТЕРИАЛЫ И МЕТОДЫ
Проспективное одноцентровое исследование 47 пациентов с гонартрозом проведено в 2023 г. в клинике травматологии, ортопедии и патологии суставов университетской клинической больницы № 1 кафедры травматологии, ортопедии и хирургии катастроф Сеченовского университета.Критерии включения пациентов в исследование:
· возраст пациентов более 18 лет;
· диагноз — гонартроз 3-4 степени по классификации Kellgren - Lawrence;
· наличие письменного информированного согласия на выполнение операции ТЭКС по предложенной методике.
Критерии невключения пациентов в исследование:
· риск анестезиологического пособия по шкале АSА более III;
· индекс массы тела (ИМТ) больше 45 кг/м2;
· деформация коленного сустава (варус >10°);
· вальгусная деформация коленного сустава;
· разгибательная контрактура коленного сустава до 90°;
· наличие металлоконструкции на пораженной стороне;
· выполненное тотальное эндопротезирование контралатерального коленного сустава методом механического выравнивания.
Критерии исключения пациентов из исследования:
· отказ пациента от дальнейшего участия в исследовании;
· несоблюдение пациентом предписанного режима.
Исследование одобрено локальным этическим комитетом Сеченовского университета (протокол от 08.12.22 № 25-22) и зарегистрировано на ClinicalTrials.gov (ID: NCT05750784).
Информированное согласие пациентов на участие в исследовании получено до включения в исследование.
В исследовании изучали угол HKA, латеральный дистальный бедренный угол (ЛДБУ) и медиальный проксимальный тибиальный угол (МПТУ) до и после операции, которые измеряли врачи-рентгенологи совместно с врачами травматологами-ортопедами в программе RadiAnt DICOM Viever и заносили в базу данных.
Статистическую обработку клинического материала проводили с помощью программы IBM SPSS Statistics 23 (SPSS Inc., Чикаго, Иллинойс): группировка данных, вычисление интенсивных и экстенсивных показателей, определение средней ошибки относительных величин, определение нормального распределения критерием Шапиро - Уилка. Для истинно числовых переменных (возраст, ИМТ, механическая ось, ЛДБУ, МПТУ) рассчитывали частотные гистограммы и величины статистических параметров, включая среднее арифметическое (M), среднеквадратичное отклонение (ст), статистическую погрешность среднего (m), минимальное и максимальное значение и медиана (Me). Для анализа изменений показателей в динамике при нормальном распределении до и после операции использовали парный критерий Стьюдента, при ненормальном распределении — критерий Уилкоксона. Различия считали достоверными (статистически значимыми) при р < 0,05.
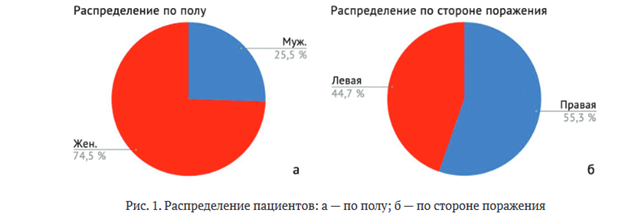
Согласно критериям включения и невключения для клинического исследования методом сплошной выборки отобрано 47 пациентов (12 мужчин и 35 женщин) (рис. 1, а). Сторона поражения: слева — у 21; справа — у 26 пациентов (рис. 1, б).
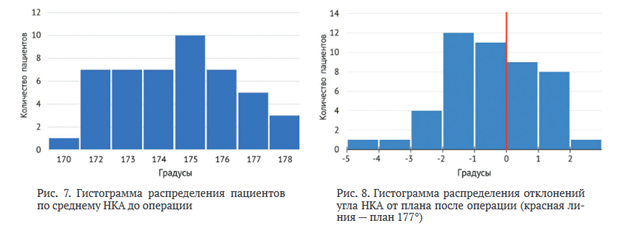
Средний возраст пациентов составил (65,87 ± 7,4) года (критерий Шапиро - Уилка, р = 0,307), средний ИМТ — (31,3 ± 4,7) кг/м2 (р = 0,099). Медиана угла HKA до операции — 175° (мин. — 170°; макс. — 178°) (р = 0,093). Медиана ЛДБУ до операции — 87° (мин. — 83°; макс. — 90°) (р = 0,002), медиана МПТУ до операции — 87° (мин. — 83°; макс. — 90°) (р = 0,00б) (табл. 1).
При анализе данных по возрасту, ИМТ и механической оси распределение является нормальным; данные ЛДБУ, МПТУ оцениваются как отличные от нормального распределения (рис. 2).
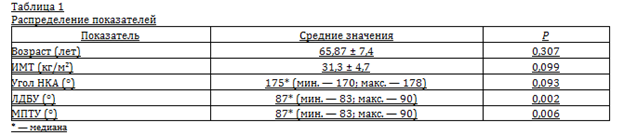
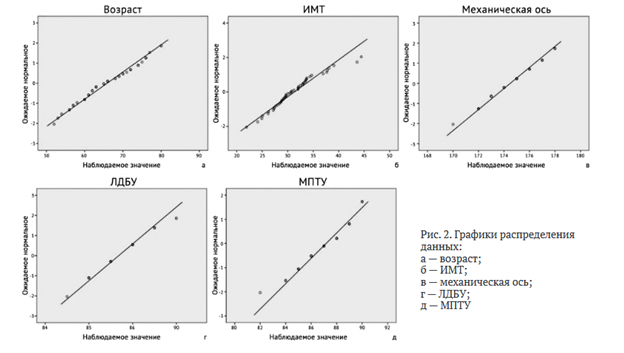
Рис. 2. Графики распределения данных: а — возраст; б — ИМТ; в — механическая ось; г — ЛДБУ; д — МПТУ
Наблюдаемое значение
Техника. Для реализации цели исследования использовали автономную роботическую систему T-Solution One® (THINK Surgical, Inc., США). Технология роботизированного тотального эндопротезирования коленного сустава (РоТЭКС) состояла из трех этапов: КТ-исследование нижних конечностей, предоперационное планирование в системе TPLAN и операция при помощи установки TCAT.
КТ-исследование выполняли в положении пациента лежа на спине с калибровочным стержнем, который фиксировали к пораженной конечности, результат исследования записывали на компакт-диск [21].
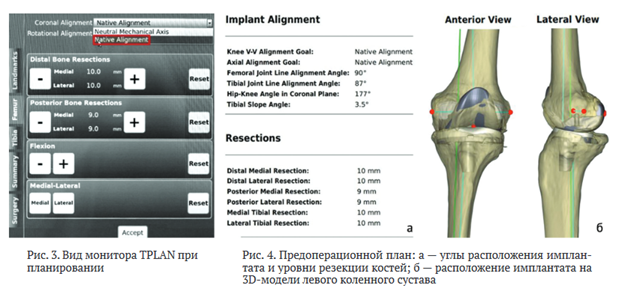
Компакт-диск с данными загружали в планировочную систему TPLAN для сегментации срезов КТ-исследования с последующим созданием SD-модели нижней конечности пациента. Во время планирования система TPLAN позволяла выбрать механический или кинематический тип выравнивания. Особенность системы TPLAN в том, что при выборе техники кинематического выравнивания во время предоперационного планирования она автоматически устанавливает компоненты эндопротеза с учетом анатомической особенности пациента, однако позволяет хирургу скорректировать положение имплантата (рис. 3).
При этом планируемый угол HKA — 177°, как до состояния гонартроза, наклон линии коленного сустава по отношению к горизонту — до 5°. Образцом служил интактный контралатеральный сустав. Ось нижней конечности, кинематические оси, такие как чрезнадмыщелковая и продольная ось большеберцовой кости, определялись автоматически во время планирования после маркировки анатомических образований (головка и надмыщелки бедренной кости, центры плато и дистальной суставной поверхности большеберцовой кости). Ось надколенника не определяли, т.к. надколенник не входит в анатомические ориентиры при компьютерном планировании. Линию сустава не измеряли, а получали в результате резекции, которая приводит к углу HKA 177°. При механическом выравнивании планировали угол HKA— 180°, угол наклона коленного сустава—0°. План утверждал хирург, производили запись на компакт-диск (рис. 4).
Диск с утвержденным планом загружали в систему TCAT. Выполняли РоТЭКС с применением методики ограниченного кинематического выравнивания при помощи автономной роботической ортопедической системы T-Solution One® (THINK Surgical, Inc., США), под спинальной анестезией без использования пневматического турникета, производя медиальный парапателлярный доступ с вывихом надколенника наружу. Этапы РоТЭКС: фиксация нижней конечности в держатель ноги под углом сгибания 90-100°, хирургический доступ, фиксация робота к конечности пациента, оцифровка коленного сустава, резекция суставных поверхностей костей, демонтаж фиксаторов робота, обработка надколенника, примерка, оценка амплитуды движений, стабильность связочного аппарата, имплантация компонентов эндопротеза и ушивание раны (рис. 5).

Всем пациентам имплантирован эндопротез фирмы Zimmer® Persona, который на сегодняшний день имеет наибольший размерный ряд, минимальный шаг толщины вкладышей в 1 мм, тип связанности с сохранением задней крестообразной связки CR (англ.: Cruciate Retaining) с фиксированным вкладышем. Бедренные компоненты: стандартный (Standard) или узкий (Narrow), с цементным методом фиксации эндопротеза коленного сустава. Пластику надколенника не выполняли, ограничиваясь удалением остеофитов и циркулярной денервацией.
РЕЗУЛЬТАТЫ
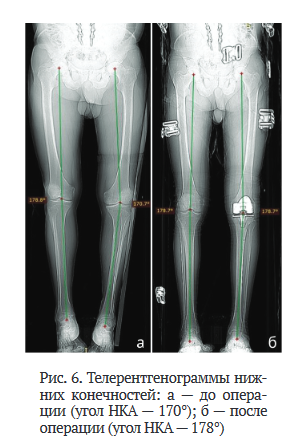
В раннем послеоперационном периоде на третьи сутки выполняли телерентгенографию нижних конечностей, после чего проводилось сравнение с дооперационной телерентгенограммой (рис. 6).
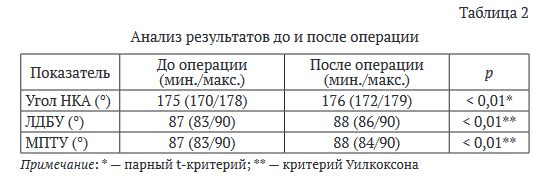
Результаты анализа предоставлены в таблице 2. На контрольных телерентгенограммах средний угол HKA после операции составил (176 ± 1,5)° (парный t-критерий, p > 0,01). В 42,6 % случаев отклонение от плана находилось в пределах ± 1°, в 44,7 % случаев отклонение составило ± 2°, в остальных 12,7 % случаев было отклонение в отрицательную сторону: от -5° до -3° (рис. 7, 8).
Среднее значение ЛДБУ и МПТУ после операции составило 88° (p > 0,01, критерий Уилкоксона).
ОБСУЖДЕНИЕ
Таким образом, мы получили результаты значения угла HKA после операции (176,0 ± 1,5)° со статистической незначимостью парного t-критерия < 0,01, то есть в пределах ± 2° отклонения от планового показателя в 177° были у 87,3 % пациентов, и только в 12,7 % случаев отклонение составило более 2°, что, несомненно, является отличным результатом.
V. Masse et al. описали методику персонализированного выравнивания, основной целью которой является воспроизведение натяжения связок коленного сустава до формирования артрита, при помощи полуактивного робота ROSA Knee system и имплантатов Zimmer Persona, используя вкладыш с типом связанности Medial Congruent (MC), с помощью которого авторы реализовали персонализированный метод выравнивания [24]. Но в своем исследовании авторы не приводят результатов измерения углов оси конечности после операции, ограничиваясь результатами функциональных шкал.
L. Binfeng et al. в мета-анализе провели сравнение между механическим (553 случая) и кинематическим (559 случаев) типами выравнивания, где в группе с кинематическим выравниванием функциональные результаты значительно лучше по показателям шкал WOMAC, KSS и амплитуде движений, но по радиологическим показателям (углы HKA, ЛДБУ и МПТУ) разница не зарегистрирована [25].
Исследуя параметры походки у пациентов после ТЭКС, P.-A. Vendittoli et al. показали, что пациенты, которым выполнили операцию по методике кинематического выравнивания, по характеру походки ближе к контрольной группе, чем пациенты с механическим выравниванием оси конечности [26].
В ретроспективном исследовании B. Ollivier et al., в котором 200 пациентам, разделенным на три группы (до операции с варусной, нейтральной и вальгусной деформацией), выполнили РоТЭКС при помощи полуактивной роботической установки MAKO® (Stryker) по методике кинематического выравнивания, выводом стало то, что при кинематическом выравнивании бедренный компонент располагается в чрезмерном вальгусном положении и внутренней ротации в группе вальгус и в меньшей степени в группе нейтральной оси коленного сустава по сравнению с функциональным выравниванием [27].
J. O. Aflatooni et al. пришли к мнению, что функциональное выравнивание — это компромисс между механическим и кинематическим выравниванием, которое устраняет конституционную варусную/валь- гусную деформацию, обеспечивает сгибание до 90° и позволяет избежать повреждения связок, однако целью остается стабильность и длительность выживания функционирующего протеза [28].
Z.S. Morrisey et al. сравнили РоТЭКС при помощи полуактивной роботической системы VELYS™ (DePuy Synthes, Варшава, США) методом кинематического выравнивания с традиционной техникой механического выравнивания. По функциональным результатам, включая болевой синдром, через 6 нед. после операции явных отличий не было. Через 6 мес. пациенты, которым выполнено РоТЭКС, имели объем движений в оперированном коленном суставе больше, чем во второй группе [29].
M. Kafelov et al. сравнили две группы пациентов (200 случаев): пациентам одной группы выполняли РоТЭКС с функциональным позиционированием, второй — применяли мануальную технику ТЭКС с кинематическим выравниванием. В группе с РоТЭКС показатели по опроснику FJS-12 были гораздо выше, чем в группе мануальной техники [30].
K. Huber et al. в ретроспективном анализе с применением полуактивной роботической установки MAKO® (Stryker) показали, что только 44 % пациентов возможно применить методику кинематического выравнивания и получить хороший клинический результат [31].
Таким образом, в доступной литературе мы не обнаружили результатов рентгенологического исследования тазобедренно-коленно-голеностопного угла во фронтальной проекции до и после роботизированной тотальной артропластики коленного сустава и сравнения их с результатами предоперационного планирования по методике кинематического выравнивания оси конечности. Полученные нами результаты показывают высокую точность реализации предоперационного плана.
ЗАКЛЮЧЕНИЕ
Применение автономной роботической установки при ТЭКС позволяет эффективно выполнить кинематическое выравнивание оси нижней конечности с точностью до ± 2° у 87,3 % пациентов.
Список литературы
1. Bellemans J. Neutral mechanical alignment: a requirement for successful TKA: opposes. Orthopedics. 2011;34(9):e507-e509. doi: 10.3928/01477447-20110714-41
2. Eckhoff DG, Bach JM, Spitzer VM, et al. Three-dimensional mechanics, kinematics, and morphology of the knee viewed in virtual reality. J Bone Joint Surg Am. 2005;87 Suppl 2:71-80. doi: 10.2106/JBJS.E.00440
3. Almaawi AM, Hutt JRB, Masse V, et al. The impact of mechanical and restricted kinematic alignment on knee anatomy in total knee arthroplasty. J Arthroplasty. 2017;32(7):2133-2140. doi: 10.1016/j.arth.2017.02.028
4. Lin YH, Chang FS, Chen KH, et al. Mismatch between femur and tibia coronal alignment in the knee joint: classification of five lower limb types according to femoral and tibial mechanical alignment. BMC Musculoskelet Disord.
5. MacDessi SJ, Griffiths-Jones W, Harris IA, et al. Coronal Plane Alignment of the Knee (CPAK) classification. Bone Joint J. 2021;103-B(2):329-337. doi: 10.1302/0301-620X.103B2.BJJ-2020-1050.R1
6. Hirschmann MT, Hess S, Behrend H, et al. Phenotyping of hip-knee-ankle angle in young non-osteoarthritic knees provides better understanding of native alignment variability. Knee Surg Sports Traumatol Arthrosc. 2019;27(5):1378-1384.
7. Robinson RP. The early innovators of today's resurfacing condylar knees. J Arthroplasty. 2005;20(1 Suppl 1):2-26. doi: 10.1016/j.arth.2004.11.002
8. Insall JN, Binazzi R, Soudry M, Mestriner LA. Total knee arthroplasty. Clin OrthopRelatRes. 1985;(192):13-22.
9. Matassi F, Pettinari F, Frascona F et al. Coronal alignment in total knee arthroplasty: a review. J Orthop Traumatol. 2023;24(1):24. doi: 10.1186/s10195-023-00702-w
10. Begum FA, Kayani B, Magan AA, et al. Current concepts in total knee arthroplasty : mechanical, kinematic, anatomical, and functional alignment. Bone Jt Open. 2021;2(6):397-404. doi: 10.1302/2633-1462.26.BJO-2020-0162.R1
11. Hungerford DS, Krackow KA. Total joint arthroplasty of the knee. Clin Orthop Relat Res. 1985;(192):23-33
12. Riviere C, Iranpour F, Auvinet E, et al. Alignment options for total knee arthroplasty: A systematic review. Orthop Traumatol Surg Res. 2017;103(7):1047-1056. doi: 10.1016/j.otsr.23017.07.010
13 . McClelland JA, Webster KE, Feller JA. Gait analysis of patients following total knee replacement: a systematic review. Knee. 2007;14(4):253-263. doi: 10.1016/j.knee.2007.04.003 2.
14. The Chitranjan Ranawat award: is neutral mechanical alignment normal for all patients? The concept of constitutional varus. Clin Orthop Relat Res. 2012;470(1):45-53. doi: 10.1007/ s11999-011-1936-5
15. Howell SM, Papadopoulos S, Kuznik KT, Hull ML. Accurate alignment and high function after kinematically aligned TKA performed with generic instruments. Knee SurgSports TraumatolArthrosc. 2013;21(10):2271-2280.
16. Calliess T, Bauer K, Stukenborg-Colsman C, et al. PSI kinematic versus non-PSI mechanical alignment in total knee arthroplasty: a prospective, randomized study. Knee Surg Sports Traumatol Arthrosc. 2017;25(6):1743-1748.
17. Blakeney WG, Vendittoli PA. Kinematic Alignment Total Knee Replacement with Personalized Instruments. 2020. In: Riviere C, Vendittoli PA, eds. Personalized Hip and Knee Joint Replacement [Internet]. Cham (CH): Springer; 2020. Chapter
18. Morcos MW, Uhuebor D, Vendittoli PA. Overview of the different personalized total knee arthroplasty with robotic assistance, how choosing? Front Surg. 2023;10:1120908. doi: 10.3389/fsurg.2023.1120908 197. Wan X, Su O, Wang D, et al. Robotic arm-assisted total knee arthroplasty improves preoperative planning and intraoperative decision-making. J Orthop Surg Res. 2021;16(1):670. doi: 10.1186/s13018-021-02815-6
19. Лычагин А.В., Грицюк А.А., Рукин Я.А. и др. Клиническая эффективность и точность выравнивания механической оси при роботизированном тотальном эндопротезировании коленного сустава. Гений ортопедии. 2023;29(5):487-494. doi: 10.18019/1028-4427-2023-29-5-487-494. EDN: OKZVVF.
20. Balaguer-Castro M, Torner P, Jornet-Gibert M, Martmez-Pastor JC. Current situation of robotics in knee prosthetic surgery, a technology that has come to stay? Rev Esp Cir Ortop Traumatol. 2023;67(4):334-341. doi: 10.1016/j. recot.2022.10.011
21. Лычагин А.В., Грицюк А.А., Елизаров М.П. с соавт. Рандомизированное двойное контролируемое сравнительное исследование точности выравнивания механической оси нижней конечности. Медицинский вестник ГВКГ им. Н.Н. Бурденко. 2023;4(3):40-47. doi: 10.53652/2782-1730-2023-4-3-40-47
22. Masse V, Cholewa J, Shahin M. Personalized alignment™ for total knee arthroplasty using the ROSA® Knee and Persona® knee systems: Surgical technique. Front Surg. 2023;9:1098504. doi: 10.3389/fsurg.2022.1098504
23. Liu B, Feng C, Tu C. Kinematic alignment versus mechanical alignment in primary total knee arthroplasty: an updated meta-analysis of randomized controlled trials. J Orthop Surg Res. 2022;17(1):201. doi: 10.1186/s13018-022-03097-2
24. Vendittoli P-A, Martinov S, Blakeney WG. Restricted kinematic alignment, the fundamentals, and clinical applications. Front Surg. 2021;8:697020. doi: 10.3389/fsurg.2021.697020
25. Ollivier B, Vandenneucker H, Vermue H, Luyckx T. A robotic-assisted simulation of kinematic alignment in TKA leads to excessive valgus and internal rotation in valgus knees. Knee Surg Sports Traumatol Arthrosc. 2023;31(11):4747-4754.
26. Aflatooni JO, Wininger AE, Park KJ, Incavo SJ. Alignment options and robotics in total knee arthroplasty. Front Surg. 2023;10:1106608. doi: 10.3389/fsurg.2023.1106608
27. Morrisey ZS, Barra MF, Guirguis PG, Drinkwater CJ. Transition to robotic total knee arthroplasty with kinematic alignment is associated with a short learning curve and similar acute-period functional recoveries. Cureus. 2023;15(5):e38872.
28. Kafelov M, Batailler C, Shatrov J, et al. Functional positioning principles for image-based robotic-assisted TKA achieved a higher Forgotten Joint Score at 1 year compared to conventional TKA with restricted kinematic alignment. Knee Surg Sports Traumatol Arthrosc. 2023;31(12):5591-5602. doi: 10.1007/s00167-023-07609-3
29. Huber K, Christen B, Calliess S, Calliess T. True kinematic alignment is applicable in 44% of patients applying restrictive indication criteria-A retrospective analysis of 111 TKA using robotic assistance. JPers Med. 2021;11(7):662.
Информация об авторах:
Алексей Владимирович Лычагин — доктор медицинских наук, профессор, директор клиники, заведующий кафедрой
Андрей Анатольевич Грицюк — доктор медицинских наук, профессор кафедры
Евгений Борисович Калинский — доктор медицинских наук, профессор кафедры
Ярослав Алексеевич Рукин — кандидат медицинских наук, заведующий отделением, доцент кафедры
Михаил Павлович Елизаров — кандидат медицинских наук, ассистент кафедры
Максим Ярославович Гавловский — аспирант
Константин Хадисович Томбоиди — клинический ординатор
Теги: коленный сустав
234567 Начало активности (дата): 05.03.2025
234567 Кем создан (ID): 989
234567 Ключевые слова: коленный сустав, робот, ограниченное кинематическое выравнивание, роботизированное тотальное эндопротезирование коленного сустава
12354567899
Похожие статьи
Первичное и ревизионное эндопротезирование тазобедренного сустава с восполнением дефектов вертлужной впадиныРентген на дому 8 495 22 555 6 8
Переломы костей стопы (кроме переломов пяточной кости)
Переломы лодыжек
Переломы проксимального отдела голени


