 08.05.2017
08.05.2017
Анализ устойчивости к автоколибаниям на субгармонических частотах импульсных источников тока программируемой формы
Методом точечных отображений определены границы областей устойчивости к автоколебаниям на субгармонических частотах в одноконтурной системе управления источника тока с ПИ-регулятором,ШИП с ШИМ2 и индуктивным сглаживающим фильтром.
Методом точечных отображений определены границы областей устойчивости к автоколебаниям на субгармонических частотах в одноконтурной системе управления источника тока с ПИ-регулятором,ШИП с ШИМ2 и индуктивным сглаживающим фильтром.
В работе рассматривается импульсивный источник тока с замкнутой одноконтурной системой автоматического регулирования
(САР) тока, структурная схема и временные диаграммы работы которой представленны на рис. 1
САР содержит пропорционально-интегральный регулятор тока (РТ) с коэффициентом передачи Кп и постоянной времени интегрирования Ти ; широтно-импульсный модулятор (ШИМ), реализующий широтно-импульсную модуляцию второго рода (ШИМ-2) и построенный на основе генератора опорного напряжения (ГОН) и компараторов; индуктивный сглаживающий фильтр (Ф) с постоянной времени Тф и статическим коэффициентом передачи Кф ; датчик тока (ДТ) с коэффициентом передачи Кдт.
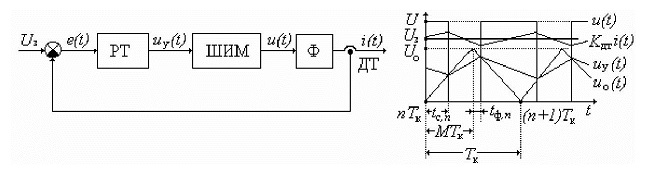
Рис. 1. Структурная схема и временные диаграммы работы САР
РТ преобразует сигнал ошибки e(t) = Uз - Кwi(t) , где U3
- сигнал задания тока i(t), в сигнал управления иу(t). ГОН формирует опорный сигнал ио
(t) пилообразной формы с амплитудой U0, периодом Тк
и глубиной модуляции М (0 <M < 1) [1].
Выходной сигнал ШИМ u(t) представляет собой последовательность прямоугольных импульсов с амплитудой U, срез и фронт которых на и-м периоде Тк формируются в моменты времени tc n и tф n соответственно.
Возможны различные режимы работы САР. Нормальным (основным) является режим вынужденных колебаний с периодом Тк
,
задаваемым ГОН. Особыми являются режимы вынужденных колебаний с периодом, не равным Тк. Характерными особыми режимами для САР с ШИМ-2 являются режим автоколебаний на субгармонических частотах и скользящий режим.
Обзор работ, посвященных анализу и синтезу САР с ШИМ-2, позволяет сделать вывод о том, что в них эти диапазоны ограничиваются либо условиями устойчивости к автоколебаниям на субгармонических частотах, либо условиями отсутствия скользящего режима. Так, например, в работе [2] предложена методика параметрического синтеза рассматриваемой САР, заключающаяся в таком выборе значений Тф и Кп , чтобы при заданных значениях Тк, U3,М = 0.5 и условии Ти = Тф обеспечить требуемое быстродействие САР и максимально допустимый уровень пульсаций тока i(t).
При этом выбор значения Кп, определяющего быстродействие САР,ограничен только условиями отсутствия скользящего режима, а устойчивость к автоколебаниям на субгармонических частотах не рассмотрена. Следует отметить, что под условиями устойчивости системы к автоколебаниям на субгармонических частотах специалисты, занимающиеся динамикой систем с вентильными преобразователями, понимают на самом деле условия, при которых такие колебания не возникают [1, 3]. В работе [4] выбор значения Кп ограничен только условиями устойчивости к автоколебаниям на субгармонических частотах, поскольку возникновение скользящего режима исключено за счет введения дополнительных узлов в ШИМ, в частности ^-триггера.
Необходимо отметить, что подобное схемотехническое решение может быть реализовано лишь при М = 0 или М = 1.
Необходимо также отметить, что САР с ШИМ-2 при М = 0.5 обладает лучшими динамическими характеристиками,чем при М = 0 или М = 1 [1]. Таким образом, вопрос о выборе параметров САР с учетом как условий устойчивости к автоколебаниям на субгармонических частотах, так и условий отсутствия скользящего режима при 0 < M < 1 является актуальным.
Задачей данной работы является определение областей устойчивости рассматриваемой САР к автоколебаниям на субгармонических частотах и областей отсутствия скользящего режима.
Динамические процессы в САР описываются уравнениями
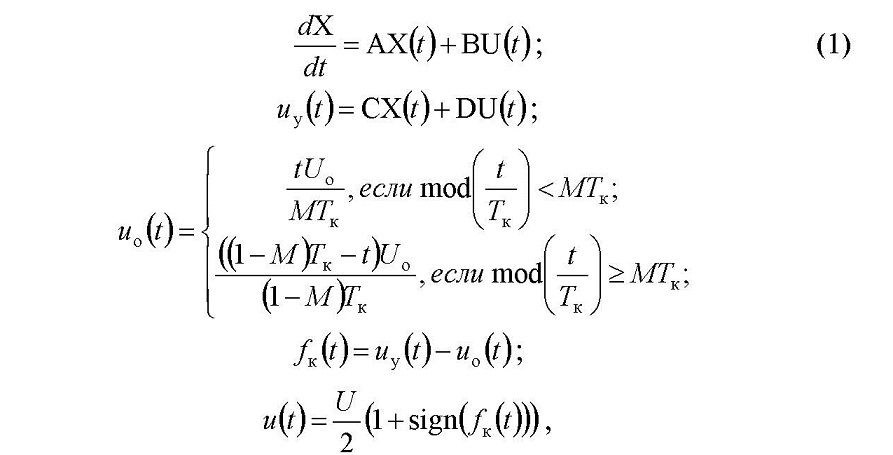
где x(t) = [/(t); uH
(t)]T
- вектор состояния линейной непрерывной части (ЛНЧ) САР; uH
(t) - интегральная составляющая сигнала
управления uу(t); U(t)= [u(t); U3]T
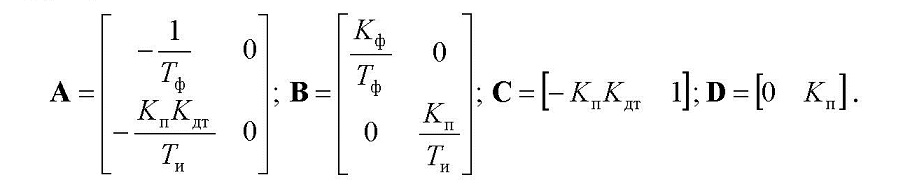
- вектор внешних воздействий на ЛНЧ; /к (t) - коммутационная функция; A, B, C и D - матрицы коэффициентов:
Границы областей отсутствия скользящего режима, полученные из условий
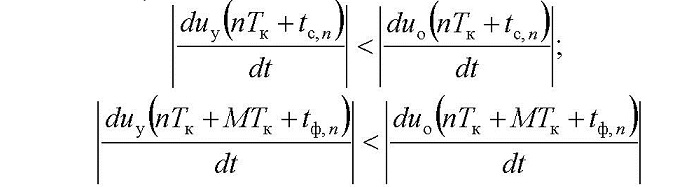
[1, 2], для рассматриваемой САР определяются неравенством

Для обеспечения устойчивости к автоколебаниям на субгармонических частотах необходимо и достаточно, чтобы все собственные числа матрицы Якоби отображения САР в простой неподвижной точке последнего, соответствующей нормальному режиму работы САР, были по модулю меньше единицы [5]. Для определения границ устойчивости рассматриваемой САР к автоколебаниям на субгармонических частотах необходимо, следовательно, получить выражения, задающие отображение, систему уравнений для вычисления значений координат простой неподвижной точки и уравнение для вычисления значений собственных чисел матрицы Якоби.
Решение уравнения (1) на каждом из временных интервалов периода Тк
имеет вид

Перепишем (3) в виде

где F(t)= eA
- фундаментальная матрица ЛНЧ; V(t)=jF(t-0)0B -to матрица, учитывающая влияние вектора u(t) на решение уравнения (1):
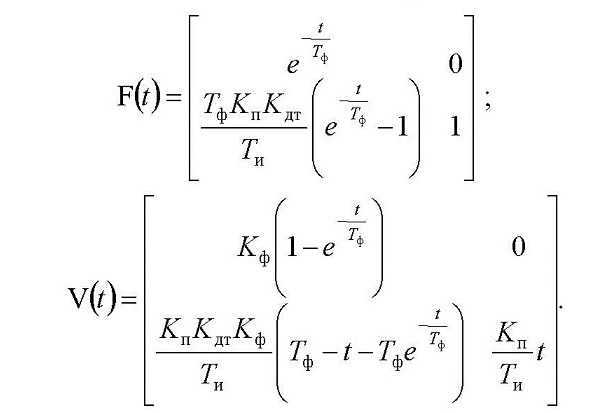
Подставляя в (4) to = пТк, получаем решение уравнения (1) на интервале нТк < t < нТк + tc n, где u(t) = U , в виде
X(t )= F(t - пТк )х(пТк ) + V(t - пТк )и(пТк ). (5)
Подставляя в (4) to
= пТк
+ tc п
, получаем решение уравнения (1) на интервале пТк
+ tc, п
< t < пТк
+ МТК
+ tfc п, где u(t) = o , в виде X(t)= F(t -(пТк + tc, п МГ + tc, п )+ V(t -(пТк + tc, п ))и(пТк + tc, п ).
Подставляя в (4) t0 = nTK + MTK +tj n, получаем решение уравнения (1) на интервале пТк + МТк +tj n < t < (n + l)TK, где u(t) = U , в виде X(t )= F(t -(nTK + MTk + tф, n ))x(nTK + MTK + ^, n )+ (7)+ v(t-(nTK + MTk + tj,n))u(nTK + MTk + tj,n)
Подставляя t = nTK +1c n в (5), получаем разностное уравнение x(nTK + tc>n)= F(tc, n)x(nTK)+ V(tc, n)u(nTK) . (8)
Подставляя t = nTK + MTK + tj n в (6), получаем разностное уравнение
x(nTK + MTK + tj, n )= F(MTk + tj, n - tc, n )x(nTK + tc, n ) + v(mTk + tj, n - tc, n)U(nTK + tc, n )
Подставляя t = (n + l)TK в (7), получаем разностное уравнение X((n + 1)Tk)= F((l-M)Tk -tj, n)x(nTK + MTk + tj,n)+ (1Q)
+ v((l -M)Tk - tj, n )u(nTK + MTk + tj, n ^ ( )
Подставляя (8) в (9), получаем разностное уравнение

Подставляя (11) в (10), получаем разностное уравнение состояния ЛНЧ САР
x((n + 1)Tk ) = f (x(nTK ))= F(Tk )x(nTK ) + v(Tk )u(nTK ) + v((l -M)Tk - tj, n)(u(nTK + MTk + tj, n )-u(nTK - tc, n ))- (12)
- v(Tk - tc, nXu(nTK)-u(nTK - tc, n))
Исходя из условия fK (nTK + tc n)= 0 с учетом (8), получаем нелинейное уравнение для вычисления значения tc

Исходя из принципа действия ШИМ-2, значения tc n и tф n не могут быть отрицательными и ограничены «сверху»:
0 < tc, n < MTk ; 0 < tfc n <(l -M)Tk . (15)
При введении обозначений
X((n + 1)Tk ) = X; X(nTK ) = X; tc,n = tc; tф,n = tф ;
U(nTK) = u(nTK + MTk + tfc
n)=[U,Uз]T
= Uи; u(nTK -tc,n)=[0,U]T
= Un
выражения (12)-(15) примут вид
X = f(Tk )x + v(Tk )Uи + (v((l - M)Tk - tф)- v(Tk - tc ))(Uи - Un); (16.1)
fc(tc, X)= C(F(tc)X + V(tc)Uи) + DUn -= 0 ; (16.2)
MTk
fф (tc, tф, X) = c(f(mTk + tф )x + v(mTk + tф )Uи - V(MTk - tc + tф )(Uи - Un ))+ DUи - U° (((1-MM)^ ~ 'ф ) = 0; (16'3)
Совокупность выражений (16) представляет собой нелинейное двумерное отображение первого порядка, заданное неявно.
Значения координат простой неподвижной точки [х*,tc
*, tф * ] находятся в результате решения системы нелинейных ал-
гебраических уравнений
f(Tk )х* - х* + v(Tk )U и + (v((l - м )Tk - tф *)-v(Tk - tc * Ж - Un ) = 0;
C(F(tc * )X* + V(tc * )Uи) + DUn - = 0;
c(f(mTk + tф * )x*+v(mTk + tф * )Uи - v(mTk - tc * + tф * )(Uи - Un))+
U° ((l - м )tk - tф *)+ DU - ° к ф- = 0,
и (l - м )Tk
полученной подстановкой X = X = X*, tc (X*) = tc *, t, (tc *, X*) = t, *в (16).
Уравнение для вычисления матрицы Якоби J имеет вид
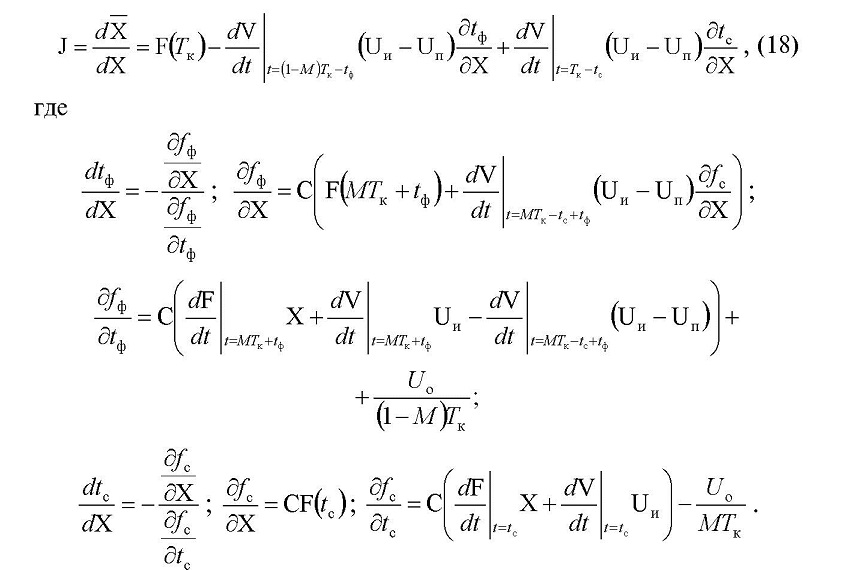
Анализ собственных чисел матрицы Якоби (18) в простой неподвижной точке (17) показал, что при значениях параметров САР,выбранных с учетом условия отсутствия скользящего режима (2),все эти числа по модулю меньше единицы.
Следовательно, при выборе значений параметров САР с учетом условия отсутствия скользящего режима, обеспечиваются и условия устойчивости к автоколебаниям на субгармонических частотах.
Литература
-
Белов Г. А. Полупроводниковые импульсные преобразователи постоянного напряжения: Учеб. пособие. - Чебоксары: Изд-во Чуваш. ун-та,1994. - 96 с.
-
Глазенко Т. А., Синицын В. А., Толмачев В. А. Сравнительный анализ динамических характеристик транзисторных широтно-импульсных преобразователей // Электротехника. - 1988. - № 3. - С. 70-75.
Теги: автоколибания, импульсные частоты, ток, матрица Якоби, уравнения
234567 Начало активности (дата): 08.05.2017 12:14:00
234567 Кем создан (ID): 645
234567 Ключевые слова: автоколибания, импульсные частоты, ток, матрица Якоби
12354567899


